













Plastid2智能车仿真系统是为“飞思卡尔杯”全国大学生智能车邀请赛开发的模拟仿真平台,可以在智能车开发前期,为智能车路径识别方案、控制策略等提供定性验证和分析。
本系统主要有以下几大特点:
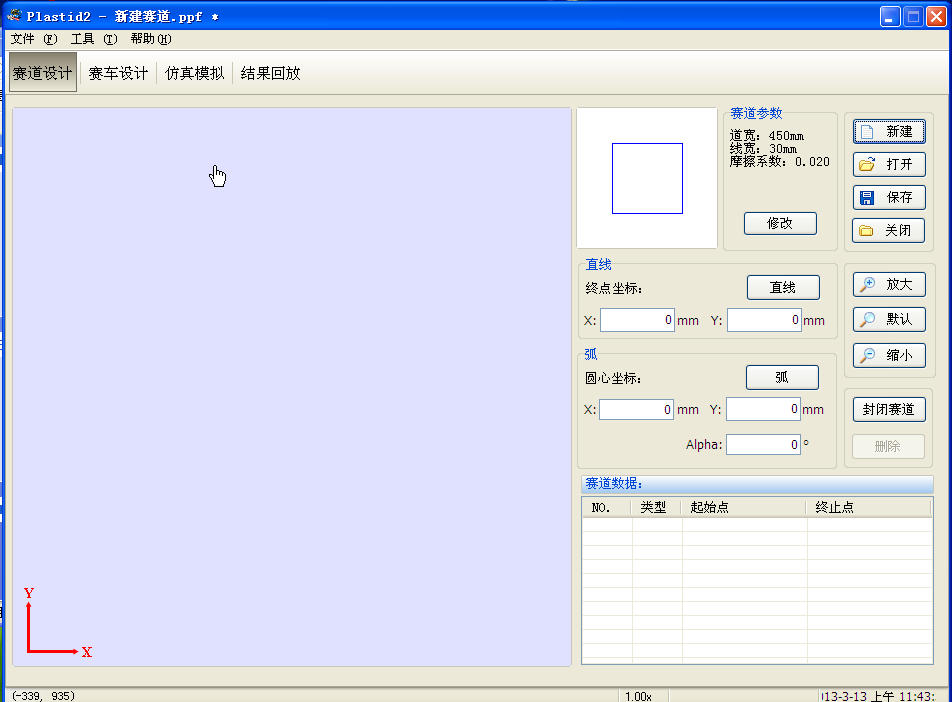
1、赛道与赛车环境模拟
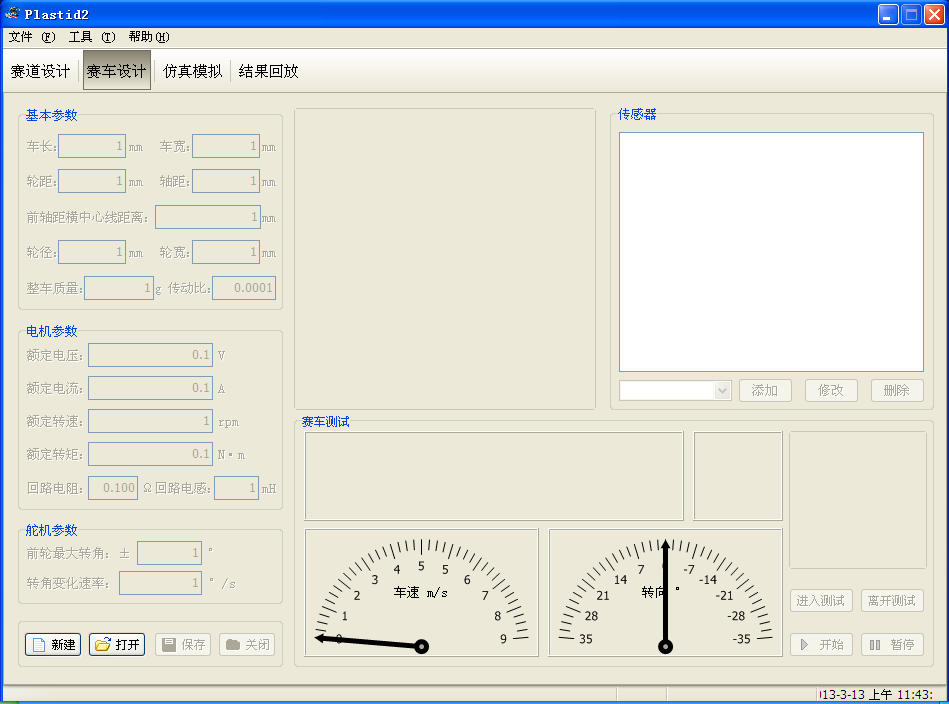
系统分别针对赛道与赛车建立模型,使用者可以方便地自行设计直线、弯道等各种形状的赛道,并可根据赛车的实际情况调整赛车的实际参数,使用灵活方便。在条件限制,没有办法制作实际试验赛道或智能车尚未完成的情况下,更可以在该系统中验证调试控制算法。
2、控制算法仿真验证
系统采用纯软件仿真方式,通过将控制程序编写成dll,系统调用dll进行仿真。dll的编写可以使用VC6、VC2005、Delphi7、Delphi2006,使用者可以根据自身情况,选择最适合自己的编程环境编写控制程序。验证调试后的算法代码,也可以很方便的移植到单片机程序中。
3、路径识别方案分析
系统提供了广泛使用的光电传感器和CCD传感器模型,使用者可以自行设计传感器的数量和排列方式、位置,在系统中进行仿真,经过分析比较,从而获得优化方案。很大程度上解决了实地试验中更换传感器排布麻烦、耗时的问题,从而极大提高方案分析效率。
- PC官方版
- 安卓官方手机版
- IOS官方手机版
 TCL新版工具箱1.0 最新版
TCL新版工具箱1.0 最新版
 Altium Designer 22 破解版22.1.2 最新免费版
Altium Designer 22 破解版22.1.2 最新免费版
 AST系列串口屏组态软件1.1 一键安装版
AST系列串口屏组态软件1.1 一键安装版
 文本显示器组态软件3.0.1 免费中文版
文本显示器组态软件3.0.1 免费中文版
 科威字符屏画面编辑器1.33 绿色中文版
科威字符屏画面编辑器1.33 绿色中文版
 kwstudio(智能人机界面)3.1 简体中文安装版
kwstudio(智能人机界面)3.1 简体中文安装版
 minitab2019免费版附破解补丁
minitab2019免费版附破解补丁
 NEC SL1000 PCPRO7.00.00 免费版
NEC SL1000 PCPRO7.00.00 免费版
 小米手机必备app打包5in1 最新免费版
小米手机必备app打包5in1 最新免费版
 变能触控屏界面开发工具4.3 简体中文绿色版
变能触控屏界面开发工具4.3 简体中文绿色版
 OS2校准工具2.009 中文绿色版
OS2校准工具2.009 中文绿色版
 捷高模组调镜头工具(QATool)1.0 中文免费版
捷高模组调镜头工具(QATool)1.0 中文免费版
 西安诺瓦箱体校正软件(NovaCLB-Cabinet)
西安诺瓦箱体校正软件(NovaCLB-Cabinet)
 诺瓦显示屏调试软件(NovaLCT)5.3.0 官方最新版
诺瓦显示屏调试软件(NovaLCT)5.3.0 官方最新版
 SU版本转换器2020 绿色免费版
SU版本转换器2020 绿色免费版
 中兴机顶盒现场配置工具(StbCfgTool)7.4.14.0 无 广告绿色版
中兴机顶盒现场配置工具(StbCfgTool)7.4.14.0 无 广告绿色版
 杜洋工作室汉字图形取模软件3 in 1 绿色综合版
杜洋工作室汉字图形取模软件3 in 1 绿色综合版
 杜洋工作室DYS音控台软件1.43 中文版
杜洋工作室DYS音控台软件1.43 中文版
 DB系列电子积木程序下载工具1.1.5 中文免费版
DB系列电子积木程序下载工具1.1.5 中文免费版
 慧明EQ231 专业数字均衡器调式工具1.2.2 简体中文官方版
慧明EQ231 专业数字均衡器调式工具1.2.2 简体中文官方版
 慧明DSP9900 卡拉OK 7.1影K解码器调式软件1.2 PC端中文版
慧明DSP9900 卡拉OK 7.1影K解码器调式软件1.2 PC端中文版
 单片机小精灵1.5.0 绿色免费版
单片机小精灵1.5.0 绿色免费版
 任意分区LED控制卡(红卡)软件 PowerLed2.89.4最新版
任意分区LED控制卡(红卡)软件 PowerLed2.89.4最新版
 金蝶智慧记(个体工商户专用记帐)6.10中文免费版
金蝶智慧记(个体工商户专用记帐)6.10中文免费版
 诺瓦异步控制系统软件(NovaLCT-Pluto)5.1.0 最新版
诺瓦异步控制系统软件(NovaLCT-Pluto)5.1.0 最新版
 电子电路仿真软件5.12官方最新版
电子电路仿真软件5.12官方最新版
 LTspice电子线路图模拟软件2019.11.7 免费版
LTspice电子线路图模拟软件2019.11.7 免费版
 形位公差查询软件免费版
形位公差查询软件免费版
 全玻璃幕墙计算软件1.0 简体中文绿色版
全玻璃幕墙计算软件1.0 简体中文绿色版
 电路仿真软件(Electronics Workbench)5.12 绿色免费版
电路仿真软件(Electronics Workbench)5.12 绿色免费版
 RoboMaster机甲大师1.0.0 pc版
RoboMaster机甲大师1.0.0 pc版
 EZSplicer拼接显示单元管理软件for 32位/64位
EZSplicer拼接显示单元管理软件for 32位/64位





 金林钣金展开软件(钣金展开软件破解版)1.7.
金林钣金展开软件(钣金展开软件破解版)1.7. 精雕5.5 绿色破解版(不用加密狗)
精雕5.5 绿色破解版(不用加密狗) 工业与民用配电设计手册第四版配套计算软件
工业与民用配电设计手册第四版配套计算软件 万能对讲机写频软件2014 绿色免费版
万能对讲机写频软件2014 绿色免费版 FX系列PLC学习软件FX-TRN-DATA汉化下载
FX系列PLC学习软件FX-TRN-DATA汉化下载 组态王7.0破解版中文破解版
组态王7.0破解版中文破解版 佳能5b00错误清零软件2.0.0.0 绿色中文版
佳能5b00错误清零软件2.0.0.0 绿色中文版 钢结构截面特性计算软件v1.0 免费绿色版
钢结构截面特性计算软件v1.0 免费绿色版 串口复用工具(ELTIMA Serial Splitter)4.0.
串口复用工具(ELTIMA Serial Splitter)4.0.