![]()

更新:2016-12-20 11:46
大小:27.5M
下载地址扫描二维码安装到手机
 50%(10票)
50%(10票) 50%(10票)
50%(10票) ES文件浏览器永久vip版(ES File Explorer)
ES文件浏览器永久vip版(ES File Explorer)
 PikPak app
PikPak app
 谷歌Play服务框架2023
谷歌Play服务框架2023
 谷歌框架安卓版(Google Play 服务)
谷歌框架安卓版(Google Play 服务)
 WaveUp软件安卓版
WaveUp软件安卓版
 SD女佣SD Maid黑金高级版
SD女佣SD Maid黑金高级版
 scene工具箱
scene工具箱
 iphone15模拟器
iphone15模拟器
 AutoJs脚本大全
AutoJs脚本大全
 lbe平行空间
lbe平行空间


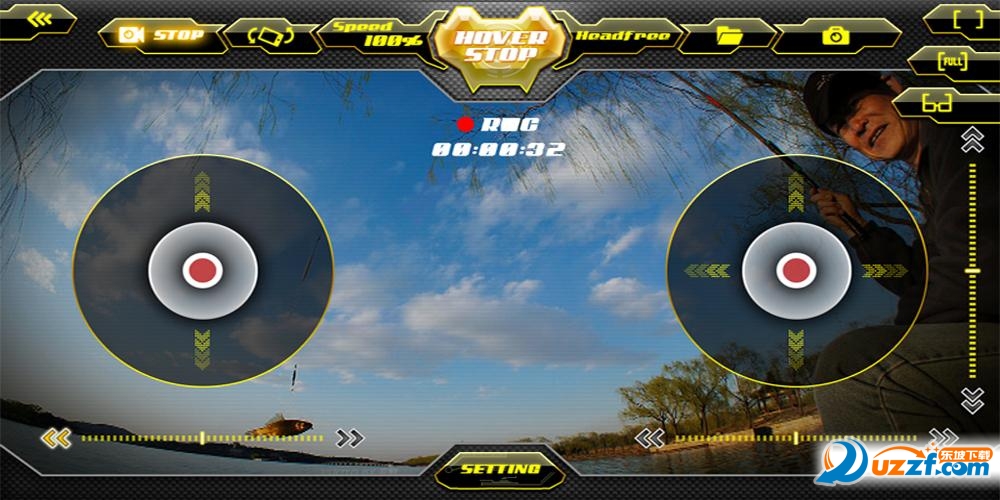
Magic UFO其实就是一款wifi控制四轴飞行器软件,能够直接用手机wifi来控制航拍图像,相当于自带wifi,而且还不需要很强的信号,直接用来做飞控就可以了,让你拍出清晰的航空图片,直接上传到手机或者电脑上面。
本应用是一款wifi传图。
手机控制四轴飞行器的手机APP。
摄像头的图像通过wifi上传到手机APP,。
手机通过wifi发出控制命令, 控制四轴。
1.自带C4005 FPV实时航拍组件,可实现拍照和录像并通过FPV软件进行实时传输到手机上播放,感受第一视觉的飞行体验;
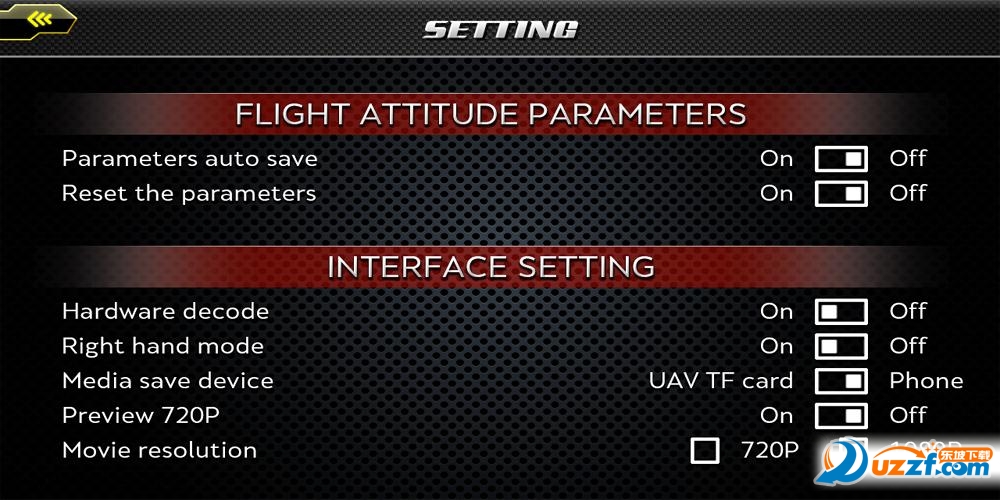
2.安装了先进的气压计,实现定高功能,双回弹遥控器,更加容易控制飞机高度,定点拍摄画面;
3.可用手机遥控飞行器:下载APP“MJX H”,打开手机WIFI网络与WIFI航拍摄像头链接,可实现APP遥控;
4.采用四轴电机驱动,飞行平稳,可轻松完成各种飞行动作;
5.采用2.4GHz自动跳频技术,可多台飞行器同时飞行;
6.最新6轴陀螺仪飞行控制系统,使飞行器更稳定,操作更容易;
7.可实现3D翻滚动作;
8.一键启动一键降落;
9.高低档变速切换,轻松选择飞行速度;
10.配有无头模式,一键返航功能。
WRTnode理论上是可以做飞控的。它自带WiFi模块(实际上TP-LINK wrxxx系列路由器用的就是WRTnode板),CPU为MIPS架构,可以刷进嵌入式Linux系统Openwrt。
你所需要的是自己连接一系列传感器。
作到稳定飞行需要PID控制,于是需要三轴或六轴加速度传感器(MPU6050);
实现定高需要气压计;
实现锁定航向需要罗盘;
实现GPS定点巡航需要GPS模块;
这些都要你自己连接并牢牢固定在你的飞控板或是机架上。
然后对数据进行卡尔曼滤波,PID控制,PWM调制,然后就看到四轴灰起来了LOL.
当然你也可以选择专门的飞控板(传感器都焊好的)和开源飞控程序,再外接一个WRTnode作为纯WiFi模块。
(开源飞控比如MWC, APM等)
因为WRTnode的计算能力有限,我没有测试过它在跑一个Linux,监听网络端口并进行姿态解算的同时还否做到实时响应。
不过欢迎题主进行尝试。我们从来不缺少创新的想法,而缺少能够将其实践的人。
 下载
绿色关机软件(Switch Off)
393KB /
下载
绿色关机软件(Switch Off)
393KB /
小编简评:Switch Off
 下载
Windows优化大师(wopti)绿色版
6.5M /
下载
Windows优化大师(wopti)绿色版
6.5M /
小编简评:文件下载后
 下载
Windows优化大师
7.3M /
下载
Windows优化大师
7.3M /
小编简评:从系统信息
 下载
时可通(windows时钟升级)
479KB /
下载
时可通(windows时钟升级)
479KB /
小编简评:windows时钟
 下载
Windows XP VLK 序列号替换器
4KB /
下载
Windows XP VLK 序列号替换器
4KB /
小编简评:右键点击“
 下载
Wireshark(抓包工具)
22.5M /
下载
Wireshark(抓包工具)
22.5M /
小编简评:Wireshark2
 下载
WinSock Expert(网络协议分析工具)
483KB /
下载
WinSock Expert(网络协议分析工具)
483KB /
小编简评:压缩包内:
 下载
Window灰色按钮突破专家
6KB /
下载
Window灰色按钮突破专家
6KB /
小编简评:Windows 按
 下载
Winamp
10.1M /
下载
Winamp
10.1M /
小编简评:Winamp是一
 MT管理器2023最新版
21.1M
2.14.0 官方正版
PikPak app
58.2M
1.38.1 最新版
MT管理器2023最新版
21.1M
2.14.0 官方正版
PikPak app
58.2M
1.38.1 最新版
 一键Root大师(华为手机root大师安卓版)
8.1M
5.1.5 最新版
一键Root大师(华为手机root大师安卓版)
8.1M
5.1.5 最新版
 一键Root精灵(安卓10一键root)
4.7M
1.5.10安卓版
一键Root精灵(安卓10一键root)
4.7M
1.5.10安卓版
 超级Root大师(root超级权限大师2022)
6.0M
最新版
超级Root大师(root超级权限大师2022)
6.0M
最新版
 360手机助手最新版2023
26.3M
v10.9.11 安卓版
MT管理器2023最新版
21.1M
2.14.0 官方正版
360手机助手最新版2023
26.3M
v10.9.11 安卓版
360手机助手最新版2023
26.3M
v10.9.11 安卓版
MT管理器2023最新版
21.1M
2.14.0 官方正版
360手机助手最新版2023
26.3M
v10.9.11 安卓版
 谷歌三件套直接下载(Go安装器)
11.2M
v4.8.7 最新版
谷歌三件套直接下载(Go安装器)
11.2M
v4.8.7 最新版
 rotation强制横屏app
4.9M
27.1.1 最新中文版
rotation强制横屏app
4.9M
27.1.1 最新中文版
 强制横屏模拟器手机版(Rotation)
4.9M
27.1.1 最新版
强制横屏模拟器手机版(Rotation)
4.9M
27.1.1 最新版
 防闪框架最新2023
15.7M
9.9.9 免root
防闪框架最新2023
15.7M
9.9.9 免root
网友评论