











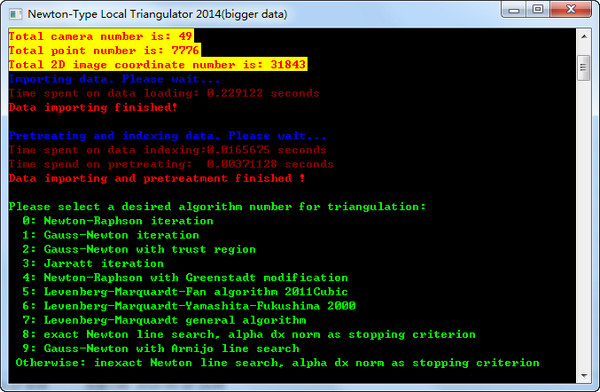
HugeDataLoader001.exe+NewtonTypeLocalSolver01.exe是基于牛顿算法的三维重建计算器 ,从已标定的针孔相机和匹配好的多视图重建点的计算器,适用于两种数据集。

三维重建的步骤
(1) 图像获取:在进行图像处理之前,先要用摄像机获取三维物体的二维图像。光照条件、相机的几何特性等对后续的图像处理造成很大的影响。
(2)摄像机标定:通过摄像机标定来建立有效的成像模型,求解出摄像机的内外参数,这样就可以结合图像的匹配结果得到空间中的三维点坐标,从而达到进行三维重建的目的。
(3)特征提取:特征主要包括特征点、特征线和区域。大多数情况下都是以特征点为匹配基元,特征点以何种形式提取与用何种匹配策略紧密联系。因此在进行特征点的提取时需要先确定用哪种匹配方法。
特征点提取算法可以总结为:基于方向导数的方法,基于图像亮度对比关系的方法,基于数学形态学的方法三种。
(4)立体匹配:立体匹配是指根据所提取的特征来建立图像对之间的一种对应关系,也就是将同一物理空间点在两幅不同图像中的成像点进行一一对应起来。在进行匹配时要注意场景中一些因素的干扰,比如光照条件、噪声干扰、景物几何形状畸变、表面物理特性以及摄像机机特性等诸多变化因素。
(5)三维重建:有了比较精确的匹配结果,结合摄像机标定的内外参数,就可以恢复出三维场景信息。由于三维重建精度受匹配精度,摄像机的内外参数误差等因素的影响,因此首先需要做好前面几个步骤的工作,使得各个环节的精度高,误差小,这样才能设计出一个比较精确的立体视觉系统。
- PC官方版
- 安卓官方手机版
- IOS官方手机版
 CASIO fx-991cn X中文版经典计算器电脑版
CASIO fx-991cn X中文版经典计算器电脑版
 海纳金属铣削加工计算器1.0 pc版
海纳金属铣削加工计算器1.0 pc版
 五金计算器1.0 绿色版
五金计算器1.0 绿色版
 Lingo18软件【附破解文件】
Lingo18软件【附破解文件】
 nano measurer粒度分析软件1.2.5 中文版
nano measurer粒度分析软件1.2.5 中文版
 赛鸽空距飞速计算软件1.0 绿色免费版
赛鸽空距飞速计算软件1.0 绿色免费版
 气缸吸盘选型计算工具1.0绿色版
气缸吸盘选型计算工具1.0绿色版
 技成工具箱1.0官方版
技成工具箱1.0官方版
 word文字计算器1.0 免费版
word文字计算器1.0 免费版
 POE交换机与AP设备组合带载能力计算器1.3 免费版
POE交换机与AP设备组合带载能力计算器1.3 免费版
 天线计算器0.2 免费版
天线计算器0.2 免费版
 J型天线计算器绿色版
J型天线计算器绿色版
 书脊计算小工具免费版
书脊计算小工具免费版
 射频功率转换计算小工具绿色版
射频功率转换计算小工具绿色版
 电阻电容计算工具(Electronics Assistant)4.31 绿色版
电阻电容计算工具(Electronics Assistant)4.31 绿色版
 传动轴校核计算程序免费版
传动轴校核计算程序免费版
 神州弹簧设计计算软件免费下载
神州弹簧设计计算软件免费下载
 PCB制作换算器1.0 绿色版
PCB制作换算器1.0 绿色版
 公法线长度计算1.0 绿色免费版
公法线长度计算1.0 绿色免费版
 太阳能路灯系统设计快速计算软件1.0 免费最新版
太阳能路灯系统设计快速计算软件1.0 免费最新版
 神医系列之补钠计算器2.0 最新免费版
神医系列之补钠计算器2.0 最新免费版
 十四位数仿真科学计算器(语音型)2.14 已注册免费版
十四位数仿真科学计算器(语音型)2.14 已注册免费版
 POCO功率电感设计工具3.0 免费版
POCO功率电感设计工具3.0 免费版
 华灯语音计算器3.0.0 免费版
华灯语音计算器3.0.0 免费版
 Free42电脑版(计算器软件)2.5.12 免费版
Free42电脑版(计算器软件)2.5.12 免费版
 社保缴费计算器1.0 免费版
社保缴费计算器1.0 免费版
 卷别计算器1.0.0 独立实验版
卷别计算器1.0.0 独立实验版
 多功能科学计算器(Kalkules)1.9.3.22 单文件免费版
多功能科学计算器(Kalkules)1.9.3.22 单文件免费版
 股票交易费用成本深度计算器3.31 免费最新版
股票交易费用成本深度计算器3.31 免费最新版
 AH计算器4.13 官方免费版
AH计算器4.13 官方免费版
 三角函数角度计算器1.0 绿色免费版
三角函数角度计算器1.0 绿色免费版
 桌面计算器(DeskCalc Pro)8.2.7 官方版
桌面计算器(DeskCalc Pro)8.2.7 官方版





 FA-124 CASIO9860程序控制软件1.0 免费版
FA-124 CASIO9860程序控制软件1.0 免费版 水蒸气及热力计算软件5.5 绿色免费版
水蒸气及热力计算软件5.5 绿色免费版 齿轮参数计算器(萝卜花齿轮计算工具)9.5 中
齿轮参数计算器(萝卜花齿轮计算工具)9.5 中 huba材料重量计算器(钢材重量计算器)1.2 绿
huba材料重量计算器(钢材重量计算器)1.2 绿 连珠终结者RenjuSolver
连珠终结者RenjuSolver PCB过孔电流计算器(PCB过孔承载电流计算器)
PCB过孔电流计算器(PCB过孔承载电流计算器)