机器人学导论(原书第3版)由克来格(Craig,J.J)著写,该书既是机器人学经典教材,又是机器人学入门必备,全书内容通俗易懂,是一本不可多得的好书。本节内容东坡小编为大家整理带来的是一份pdf格式高清扫描版机器人学导论(原书第3版)电子书,需要查阅该电子书完整内容的朋友们只需点击本文相应的下载地址进行下载即可!
机器人学导论(原书第3版)目录
译者序
前言
第1章 绪论
1.1 背景
1.2 操作臂的机构与控制
1.3 符号
参考文献
习题
编程习题
MATLAB习题
第2章 空间描述和变换
2.1 概述
2.2 描述:位置、姿态与坐标系
2.3 映射:从坐标系到坐标系的变换
2.4 算子:平移、旋转和变换
2.5 总结和说明
2.6 变换算法
2.7 变换方程
2.8 姿态的其他描述方法
2.9 自由矢量的变换
2.10 计算分析
参考文献
习题
编程习题
MATLAB习题1
MATLAB习题2
第3章 操作臂运动学
3.1 概述
3.2 连杆描述
3.3 关于连杆连接的描述
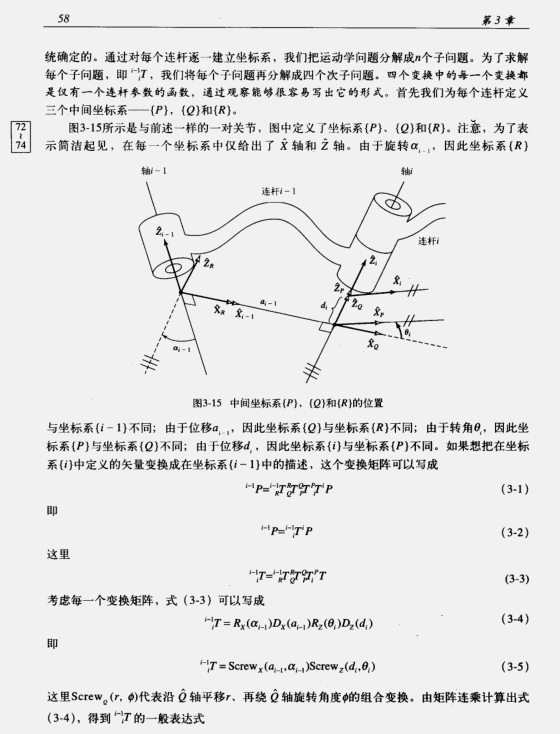
3.4 对连杆附加坐标系的规定
3.5 操作臂运动学
3.6 驱动器空间、关节空间和笛卡儿空间
3.7 举例:两种典型机器人的运动学问题
3.8 坐标系的标准命名
3.9 工具的定位
3.10 计算问题
参考文献
习题
编程习题
MATLAB习题
第4章 操作臂逆运动学
4.1 概述
4.2 可解性
4.3 当n〈6时操作臂子空间的描述
4.4 代数解法与几何解法
4.5 通过化简为多项式的代数解法
4.6 三轴相交的PIEPER解法
4.7 操作臂逆运动学实例
4.8 标准坐标系
4.9 操作臂求解
4.10 重复精度和定位精度
4.11 计算问题
参考文献
习题
编程习题
MATLAB习题
第5章 速度和静力
5.1 概述
5.2 时变位姿的符号表示
5.3 刚体的线速度和角速度
5.4 对角速度的进一步研究
5.5 机器人连杆的运动
5.6 连杆间的速度传递
5.7 雅可比
5.8 奇异性
5.9 作用在操作臂上的静力
5.10 力域中的雅可比
5.11 速度和静力的笛卡儿变换
参考文献
习题
编程习题
MATLAB习题
第6章 操作臂动力学
6.1 概述
6.2 刚体的加速度
6.3 质量分布
6.4 牛顿方程和欧拉方程
6.5 牛顿一欧拉迭代动力学方程
6.6 迭代形式与封闭形式的动力学方程
6.7 封闭形式动力学方程应用举例
6.8 操作臂动力学方程的结构
6.9 操作臂动力学的拉格朗日公式
6.10 建立笛卡儿空间的规范化操作臂动力学方程
6.11 计及非刚体效应
6.12 动力学仿真
6.13 计算效率问题
参考文献
习题
编程习题
MATLAB习题1
MATLAB习题2
MATLAB习题3
第7章 轨迹的生成
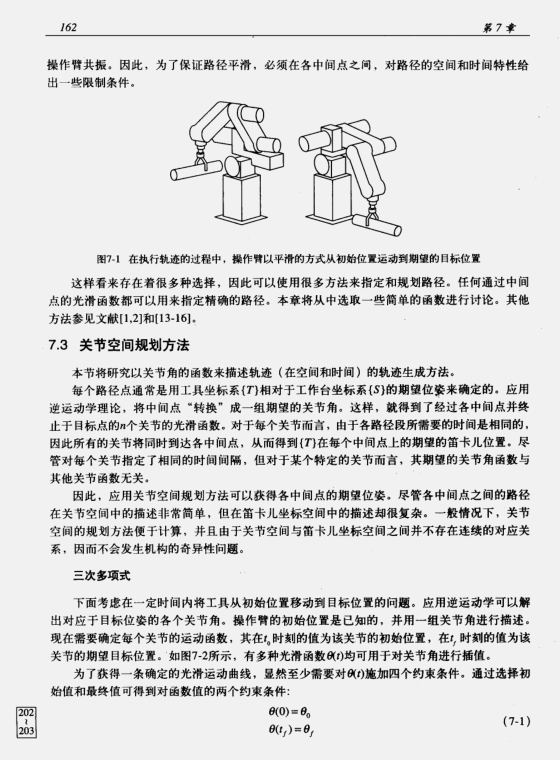
7.1 概述
7.2 关于路径描述和路径生成的综述
7.3 关节空间规划方法
7.4 笛卡儿空间规划方法
7.5 笛卡儿路径的几何问题
7.6 路径的实时生成
7.7 使用机器人编程语言描述路径
7.8 使用动力学模型的路径规划
7.9 无碰撞路径规划
参考文献
习题
编程习题
MATLAB习题
第8章 操作臂的机械设计
8.1 概述
8.2 基于任务需求的设计
8.3 运动学构形
8.4 工作空间属性的定量测量
8.5 冗余机构与闭链机构
8.6 驱动方式
8.7 刚度与变形
8.8 位置检测
8.9 力检测
参考文献
习题
编程习题
MATLAB习题
第9章 操作臂的线性控制
9.1 概述
9.2 反馈与闭环控制
9.3 二阶线性系统
9.4 二阶系统的控制
9.5 控制律的分解
9.6 轨迹跟踪控制
9.7 抗干扰
9.8 连续时间控制与离散时间控制
9.9 单关节的建模和控制
9.10 工业机器人控制器的结构
参考文献
习题
编程习题
MATLAB习题
第10章 操作臂的非线性控制
10.1 概述
10.2 非线性系统和时变系统
10.3 多输入多输出控制系统
10.4 操作臂的控制问题
10.5 实际应用中的问题
10.6 当前的工业机器人控制系统
10.7 李雅普诺夫稳定性分析
10.8 基于笛卡儿空间的控制系统
10.9 自适应控制
参考文献
习题
编程习题
第11章 操作臂的力控制
11.1 概述
11.2 工业机器人在装配作业中的应用
11.3 局部约束任务中的控制坐标系
11.4 力/位混合控制问题
11.5 质量一弹簧系统的力控制
11.6 力/位混合控制方法
11.7 当前的工业机器人控制方法
参考文献
习题
编程习题
第12章 机器人编程语言及编程系统
12.1 概述
12.2 机器人编程的三个级别
12.3 应用实例
12.4 机器人编程语言的必要条件
12.5 机器人编程语言的特殊问题
参考文献
习题
编程习题
第13章 离线编程系统
13.1 概述
13.2 离线编程系统的核心问题
13.3 引导仿真器
13.4 离线编程系统的自动子任务
参考文献
习题
编程习题
附录A 三角恒等式
附录B 24种角坐标系的旋转矩阵定义
附录C 逆运动学公式
部分习题答案
索引
机器人学导论(原书第3版)内容简介
该书系统讲解机器人学的理论知识,主要内容包括:机器人操作臂的几何性质,引起操作臂运动的力和力矩,与操作臂机械设计有关的问题和控制方法,机器人编程方法等。《机器人学导论》(原书第3版)曾作为美国斯坦福大学机器人学导论的教材,经过两次修订。书中还包括大量分级的习题和编程作业,适合教学参考。
该书可作为高等院校相关专业的教材或参考书,也可供相关技术人员参考。
机器人学导论(原书第3版)内容截图



 DJI 大疆飞行模拟1.4官方版
DJI 大疆飞行模拟1.4官方版
 关闭硬盘盒自动休眠软件附教程
关闭硬盘盒自动休眠软件附教程
 ELM327驱动1.0 官方版
ELM327驱动1.0 官方版
 沃仕达IP Camera CGI应用指南
沃仕达IP Camera CGI应用指南
 PowerPCB电路设计实用教程pdf电子版
PowerPCB电路设计实用教程pdf电子版
 PowerPCB高速电子电路设计与应用pdf高清电子版
PowerPCB高速电子电路设计与应用pdf高清电子版
 电路及电工技术基础pdf高清电子版
电路及电工技术基础pdf高清电子版
 硬盘坏道修复教程doc 免费版
硬盘坏道修复教程doc 免费版
 Revit MEP入门教程官方版doc 最新版
Revit MEP入门教程官方版doc 最新版
 新编电脑组装与硬件维修从入门到精通pdf 高清免费版
新编电脑组装与硬件维修从入门到精通pdf 高清免费版
 硬件系统工程师宝典pdf免费电子版
硬件系统工程师宝典pdf免费电子版
 xbox one手柄连接电脑教程doc完整免费版
xbox one手柄连接电脑教程doc完整免费版
 硬件工程师入门教程pdf高清免费下载
硬件工程师入门教程pdf高清免费下载
 Hyper-v虚拟机如何访问USB设备doc完整版
Hyper-v虚拟机如何访问USB设备doc完整版
 电脑主板跳线的接法详解doc最新免费版
电脑主板跳线的接法详解doc最新免费版
 线性稳压器基础知识pdf完整版
线性稳压器基础知识pdf完整版
 ModelSim简明使用教程pdf版
ModelSim简明使用教程pdf版
 数字电子技术基础教程(阎石第5版)pdf版
数字电子技术基础教程(阎石第5版)pdf版
 笔记本硬件结构终极教程pdf免费版
笔记本硬件结构终极教程pdf免费版
 电路第五版邱关源pdf高清免费版
电路第五版邱关源pdf高清免费版
 计算机组成与设计硬件软件接口第五版pdf附答案完整版
计算机组成与设计硬件软件接口第五版pdf附答案完整版
 金融炼金术(原版)pdf格式【中文完整版】
金融炼金术(原版)pdf格式【中文完整版】
 深入PHP面向对象模式与实践(中文第三版)pdf高清扫描版【完整版】
深入PHP面向对象模式与实践(中文第三版)pdf高清扫描版【完整版】
 HADOOP实战(中文第二版)pdf清晰完整电子版
HADOOP实战(中文第二版)pdf清晰完整电子版
 大数据时代 生活工作与思维的大变革pdf中文完整版免费下载
大数据时代 生活工作与思维的大变革pdf中文完整版免费下载
 U盘装系统(优盘安装操作系统)图解教程 PDFpdf完整高清版【附源代码】免费下载
U盘装系统(优盘安装操作系统)图解教程 PDFpdf完整高清版【附源代码】免费下载
 机械设计手册第五版电子版pdf高清免费版
机械设计手册第五版电子版pdf高清免费版
 疯狂java讲义(第3版)pdf (中文版)电子版
疯狂java讲义(第3版)pdf (中文版)电子版





 168个photoshop超实用修图调色教学集合【视
168个photoshop超实用修图调色教学集合【视 常见易燃易爆物品列表最新整理版【word版】
常见易燃易爆物品列表最新整理版【word版】 LabVIEW入门教程pdf格式【清华版labview例程
LabVIEW入门教程pdf格式【清华版labview例程 JGJ145-2013混凝土结构后锚固技术规程pdf完
JGJ145-2013混凝土结构后锚固技术规程pdf完 中国105个城市特色菜介绍doc格式免费版【中
中国105个城市特色菜介绍doc格式免费版【中 办公软件学习教程wordppt打包下载
办公软件学习教程wordppt打包下载 端午节主题班会ppt免费版【端午节ppt课件】
端午节主题班会ppt免费版【端午节ppt课件】 物业小区消防培训内容免费版【消防培训资料
物业小区消防培训内容免费版【消防培训资料